Two-stage routing with optimized guided search and greedy algorithm on proximity graph
Two-stage routing with optimized guided search and greedy algorithm on proximity graph
Ding Ning论文简介
Two-stage routing with optimized guided search and greedy algorithm on proximity graph 是王梦召在2021年发表于 Knowledge-Based Systems 上的期刊文章。
Abstract
随着人们对大规模检索任务的兴趣激增,邻近图现在已成为领先的范例。现有的邻近图大多采用简单的贪心算法作为近似最近邻搜索(ANNS)的路由策略,但这会导致两个问题:路由效率低和局部最优;这是因为他们忽略了不同路由阶段的特殊要求。一般来说,路由可以分为两个阶段:远离查询的阶段(S1)和靠近查询的阶段(S2)。 S1旨在快速路由到查询附近,效率占优。而S2注重的是准确地找到结果,所以准确度是最重要的。我们为每个阶段精心设计定制的路由算法,然后将它们组合在一起形成优化引导搜索和贪心算法(TOGG)的两阶段路由。对于S1,我们提出优化的引导搜索,通过查询方向的引导快速定位查询的邻域。而对于S2,我们提出了优化的贪心算法,通过敏捷地检测显式和隐式收敛路径来全面访问查询附近的顶点。最后,通过理论和实验分析,我们证明所提出的方法可以实现比最先进的工作更好的效率和效果。
内容
1、Introduction
这部分讲述了一下贪心算法导致的两个问题:
1、路由效率低下,每步都要加载所有的邻居并比较。
2、局部最优解,贪心算法不可避免地有陷入局部最优解的可能性。
针对1,有工作提出了只访问同一方向的邻居的思想,但是容易丢失重要路径、以及在最终优化阶段会丢失掉更多的重要结果。
针对2,论文指出了学习索引可以解决局部最优的问题,也就是 Learning to Route in Similarity Graphs 这篇工作。
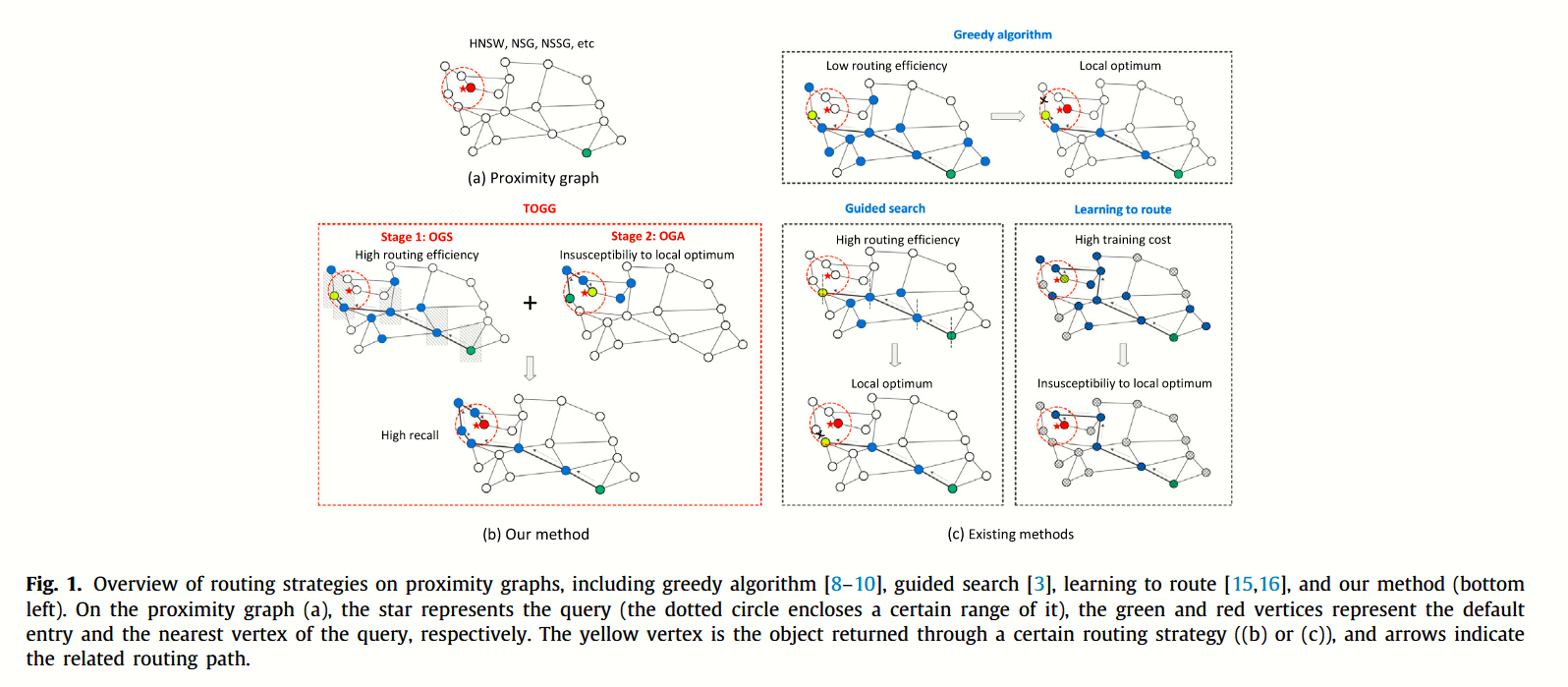
论文将导航流程归类为两个阶段,far from 和 closer to 。阶段1主要的目标是尽可能快地定位到近邻区域,阶段2的目标是精细化地查找邻居保障结果准确性。
在这个部分,论文提出了他们这样划分的创新性,并简述了研究动机。
2、Related work
这部分中,论文从近邻图和路由选择策略上分别简述了相关工作,以及和本篇工作的相关性。
近邻图
论文简述了 HNSW 、 NSG 、 NSSG 这三个拥有相似贪心导航算法的近邻图。并说明了论文是基于这三个图来实现的。
导航策略
论文针对共用的贪心导航算法中共同存在的问题,分别简述了一些工作。也就是 Introduction 中问题的详细描述:
1、导航效率低下:Hierarchical clusteringbased graphs for large scale approximate nearest neighbor search
2、局部最优解:Learning to route in similarity graphs
3、Two-stage routing strategy with optimized guided search and greedy algorithm
3.1 Motivation example
这部分是论文的重点部分。首先,论文通过几个例子分析了以往邻近图中路由策略存在的问题。接下着提出了一个新的路由框架,称为first-coarse-last-refinement,它包括两部分。
对于粗略导航阶段,论文提出优化引导搜索(OGS),它可以快速定位查询附近并确保路线沿着正确的路径。对于最后的细化阶段,论文采用优化贪心算法(OGA)在查询附近的小区域内进行精确搜索。最后,基于这个框架,论文展示了TOGG路由过程——这是一种OGS和OGA的混合路由策略——以实现优势互补。
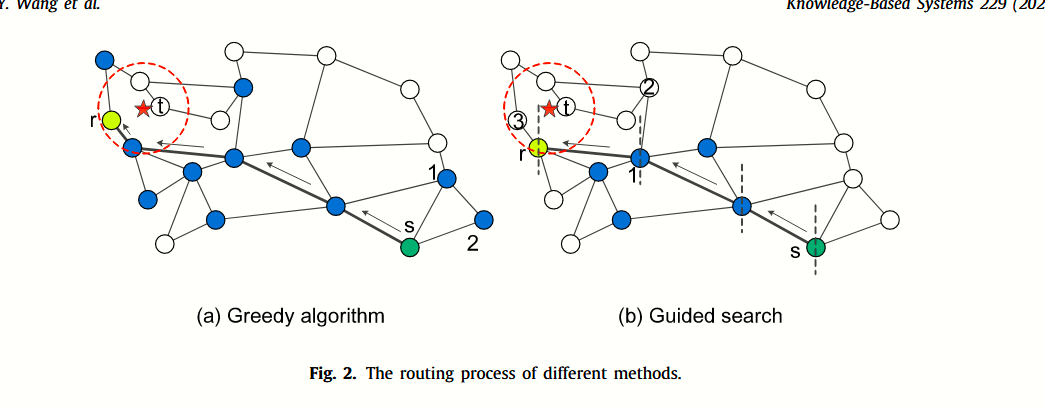
上图是问题分析的图示,下面是几个问题的例子:
1、Fig. 2(a) 图中表示了节点 1、2 是传统贪心算法需要计算的节点,但是节点与目标的方向是完全不相干的,因此可以排除。
2、Fig. 2(a) 图中,同样表示了局部最优的问题。点r并不是最优解,但是由于其是局部最优,因此还是终止了查询。
3、Fig. 2(b) 图中,表示了,当贪心选择到节点1时,节点2虽然不与目标方向一致,但是仍然是通往目标的唯一路径。但是根据方向排除路由,将导致2不被访问。这个示例主要针对 Hierarchical clusteringbased graphs for large scale approximate nearest neighbor search 一文中,面对终止的细化搜索时的不足。
4、Routing framework: First-coarse-last-refinement
论文在这部分简单介绍了算法的框架。
4.1 Optimized guided search
为了快速定位到邻居旁,论文以划分空间的方式划分每个顶点的邻居集。KD-Tree(KDT)[18,35]可以根据方向将邻居集划分为多个子树,k-means clustering(KMC)可以根据方向将邻居集划分为多个簇。因此,对于第一个粗略部分,文提出了基于改进的KDT和KMC的优化引导搜索(OGS);它们针对不同的数据集和邻近图有各自的优势,可以快速准确地定位到查询的附近。
因此,论文分别实现了对应索引结构下的导航算法。
4.1.1 modified KDT
什么是 KD Tree :
CMU CMSC 420 课件:https://www.cs.cmu.edu/~ckingsf/bioinfo-lectures/kdtrees.pdf
在欧氏空间中,给定一个包含 n 个点的有限数据集 S,第 j (j = 0, 1, …, d − 1) 维中每个数据点的最大值为 maxj,最小值为 minj, p为S中任意一点,其在第j维的值为pj,G表示在S上定义的图,p在G中的邻居集合为N(G,p),预设比例值为1/b。设gj = (maxj − minj)/b,则±gj为第j维划分区间的边界。
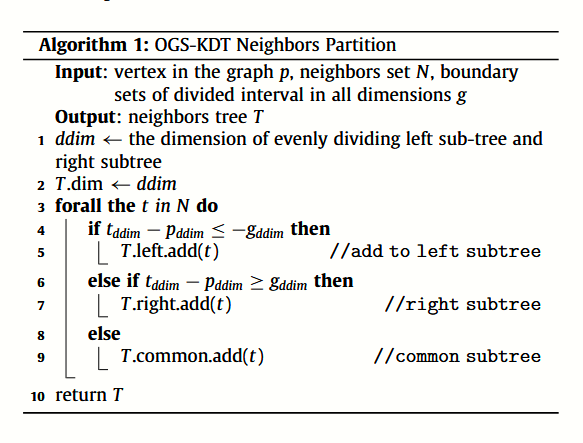
上图是论文的变形KDT的划分算法,下图是一个划分示例:
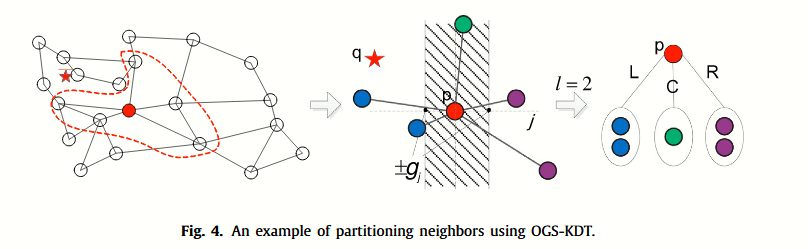
简单的说,这个KDT其实就是将某个节点p的全部邻居,用两个超平面划分开为三部分进行归类。gj是一个受b影响的可变条件,它控制着超平面的距离。事实上,这个索引结构只根据单维进行划分,因此可能会有较大误差。但是胜在简单和快速。
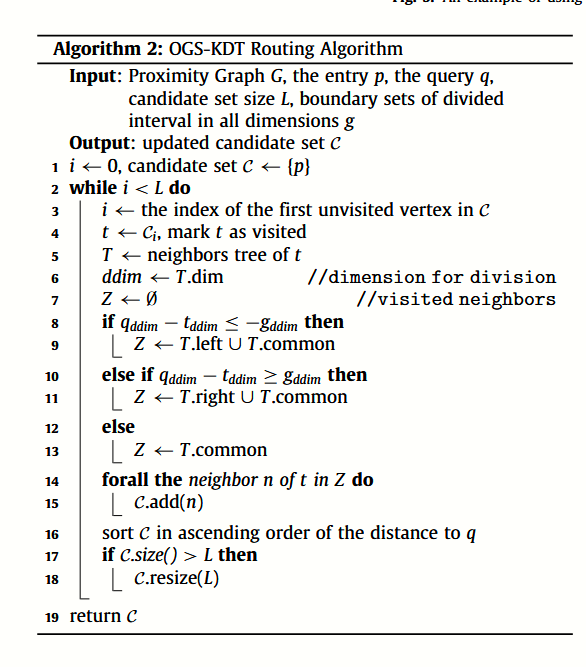
在搜索时,查询q如果导航到了节点p,将把q也进行一次同样的划分,然后根据q所在的部分,返回同样部分的节点,如下面的伪代码所示:
4.1.2 Optimized guided search based on KMC
简单来说,把所有的邻居做 k-means 聚类,然后用聚类中心点和q的距离做筛选。
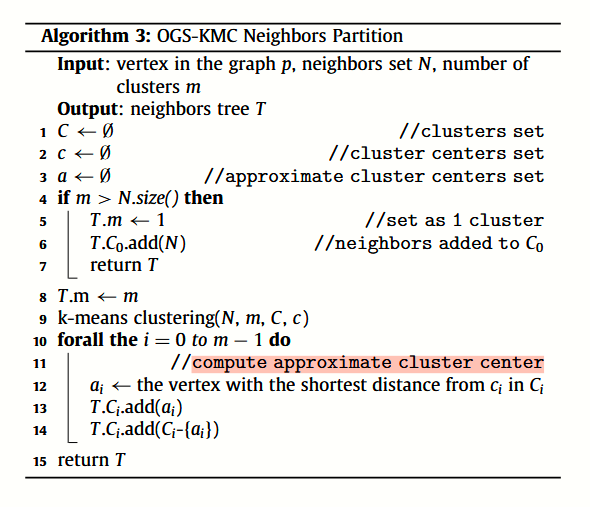
给定空间 Ed 中包含 n 个点的有限数据集 S,p 是 S 中的点,G 是 S 上定义的图,p 在 G 中的邻居集是 N(G, p),其中 N(G, p)根据k-means聚类分为m个簇,第k个簇的中心为ck,属于第k个簇的邻居顶点集合为Ck。近似聚类中心是ak,它是ck 的最近邻,ak ∈ Ck,其中k = 0, 1,…。 。 。 ,m − 1。在路由阶段,q为查询,遍历到顶点p时,需要访问的Ck满足公式:

其中 dist(q, ak) 是 q 和 ak 之间的距离。
路由的示例如下图:
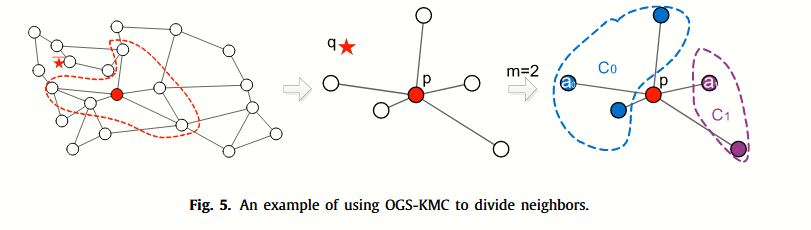
在索引阶段,节点p的邻居被划分为两个聚类。查询阶段,比较两个聚类中心点距离q的距离,只使用距离最近的聚类作为候选节点。下面是伪代码:
4.2 Optimized greedy algorithm
在靠近查询的路由阶段,根据查询的方向继续访问邻居是不合理的。否则,由于示例3所示的问题,引导策略会严重损害返回结果的准确性。因此,论文提出优化的贪婪算法(OGA)来更好地实现最后的细化部分。
1.Convergence Path 收敛路径
给定空间 Ed 中 n 个点的有限数据集 S,p、q 是 S 中的任意两点,G(V , E) 是在 S 上定义的图,V 和 E 分别是顶点集和边集。 v1、v2、. 。 。 , vi (v1 = p, vi = q) 表示 G 中从 p 到 q 的路径,即 ∀j = 1, 2,…。 。 。 , i − 1, 边 vjvj+1 ∈ E。这条路径是一条收敛路径 iff ∀j = 1, 2, 。 。 。 , i−1, dist(vj, q) > dist(vj+1, q),其中 dist(, ) 是距离。
定义如上。简言之,就是一条单调路径,和 NSG 这篇论文中提到的单调路径一致。在路径上,每个节点都不断地更接近查询点q。
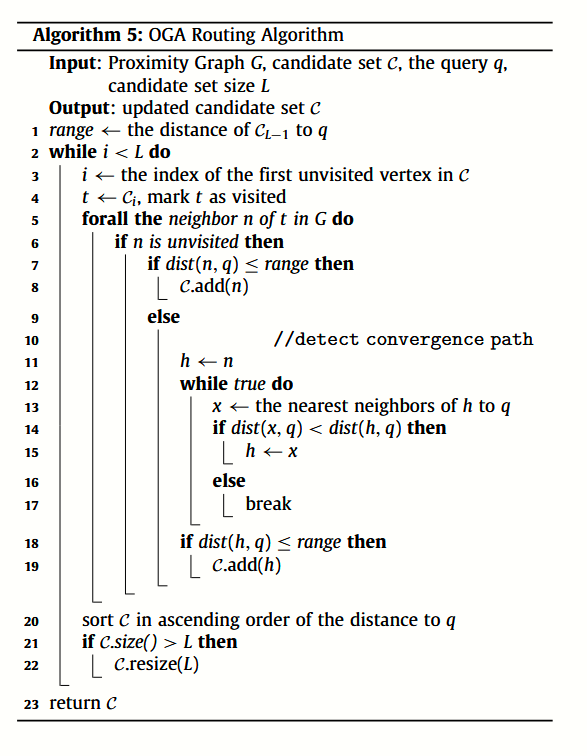
OGA不仅访问候选集中每个顶点的邻居(检测显式收敛路径),还访问邻居的邻居(检测隐式收敛路径),从而判断是否需要从某个邻居继续扩展。如果存在从当前邻居到查询附近的隐式收敛路径,OGA 继续沿着它扩展(算法 5 中的第 10-17 行)。与贪心算法相比,OGA 放松了扩展约束,从而减轻了局部最优问题。
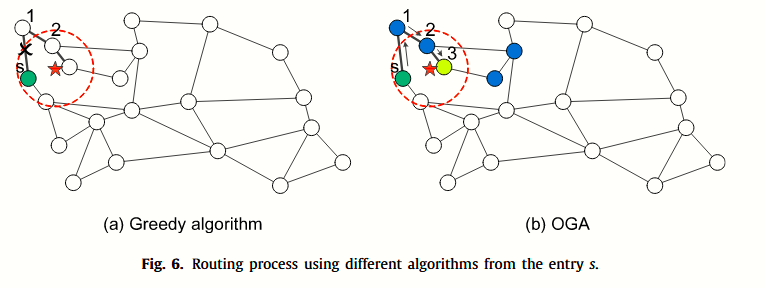
简而言之,OGA 是一个通过添加多一跳来避免陷入局部最优的小改进。
4.3 TOGG routing process
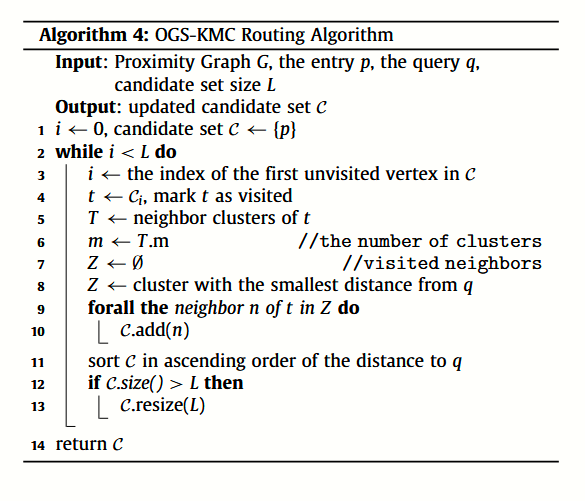
路由过程。
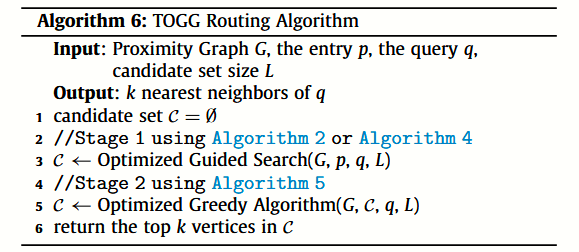
如上述伪代码,路由过程是简单的两个阶段,都分别执行到不能再优化为止。
接着论文又简述了HNSW的优化,说明了两者的差异和兼容性。
5、Algorithm complexity and parameters analysis
这部分就不看了,没什么特别重要,主要分析了两类索引构建和查询的时间复杂度,以及新添加的 OGA 的时间复杂度。
6、Experiments
论文实验用的数据集:SIFT1M,2 GIST1M,3 GloVe,4 and MNIST,
论文的 baseline 选用了四个工作:
Fast approximate similarity search based on degree-reduced neighborhood graphs (SIGKDD’2011)
Fanng: Fast approximate nearest neighbour graphs (CVPR’2016)
Hierarchical clusteringbased graphs for large scale approximate nearest neighbor search (PR’2019)
High dimensional similarity search with satellite system graph: Efficiency, scalability, and unindexed query compatibility (TPAMI’2021)
论文有两个实验指标,加速比和召回率指标为:


在保证召回率一致的前提下,论文比较了多个路由选择策略的效果:
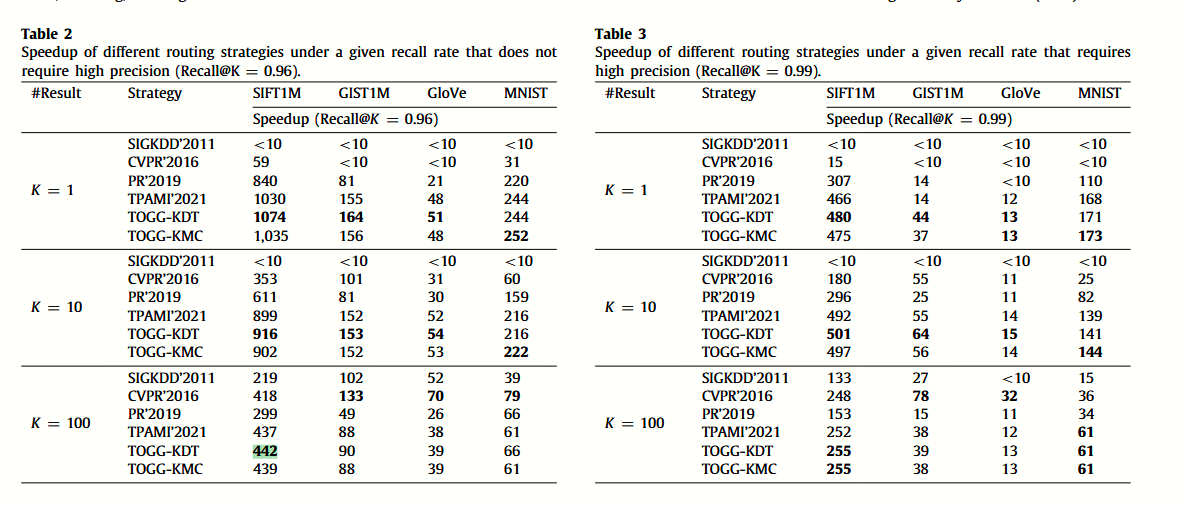
总地说,论文的策略略好于 SOTA TPAMI’2021 。

